Abstract
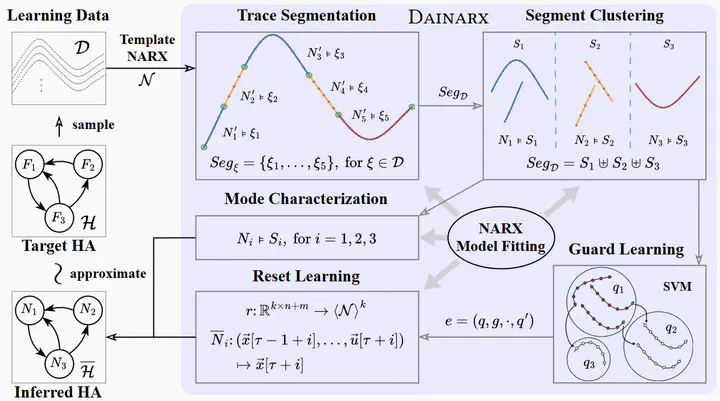
This paper addresses the problem of inferring hybrid automata from input-output traces of hybrid systems exhibiting discrete mode switches between continuously evolving dynamics. Existing approaches primarily rely on derivative-based strategies in which (i) mode switches are detected by drastic variations in derivatives and (ii) trace segments are clustered based on signal similarity – both requiring user-supplied thresholds. We present a derivative-agnostic approach, named Dainarx, for inferring nonlinear hybrid systems whose dynamics are captured by nonlinear autoregressive exogenous (NARX) models. Dainarx employs NARX models as a unified, threshold-free representation for both mode switching and segment clustering. We show that Dainarx suffices to learn models that closely approximate a general class of hybrid systems featuring high-order nonlinear dynamics with exogenous inputs, nonlinear guard conditions, linear resets, and noise. Experimental results on a collection of benchmarks demonstrate that our approach effectively and efficiently infers nontrivial hybrid automata with high-order dynamics, yielding significantly more accurate approximations than state-of-the-art techniques, while achieving robustness comparable to approaches dedicated to fitting noisy data.
Hengzhi Yu
M.Sc. Candidate
My research interests include cyber-physical systems and system identification.
Mingshuai Chen
ZJU100 Young Professor
My research interests include formal verification, programming theory, and logical aspects of computer science.
Huangying Dong
Ph.D. Candidate
My research interests include formal verification, cyber-physical systems, and hybrid systems.