Verification and Synthesis of Time-Delayed Dynamical Systems
{kind=link}
Abstract
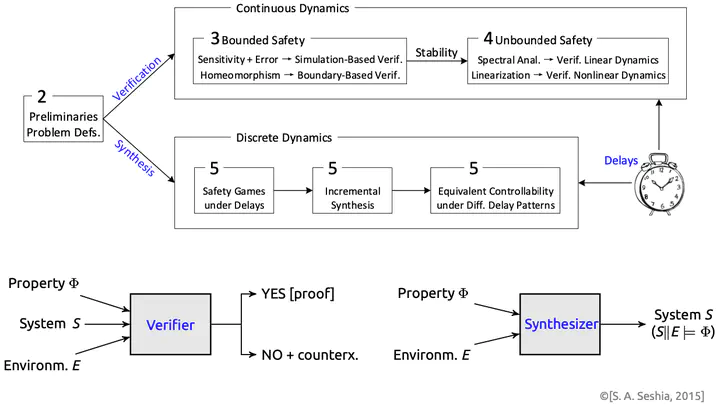
Conventional embedded systems have over the past two decades vividly evolved into an open, interconnected form that integrates capabilities of computing, communication and control, thereby triggering yet another round of global revolution of the information technology. This form, now known as cyber-physical systems, has witnessed an increasing number of safety-critical systems particularly in major scientific projects vital to the national well-being and the people’s livelihood. Prominent examples include automotive electronics, health care, nuclear reactors, high-speed transportations, manned spaceflight, etc., in which a malfunction of any software or hardware component would potentially lead to catastrophic consequences like significant casualties and economic losses. Meanwhile with the rapid development of feedback control, sensor techniques and computer control, time delays have become an essential feature underlying both the continuous evolution of physical plants and the discrete transition of computer programs, which may well annihilate the safety certificate and control performance of embedded systems. Traditional engineering methods, e.g., testing and simulations, are nevertheless argued insufficient for the zero-tolerance of failures incurred in time-delayed systems in a safety-critical context. Therefore, how to rigorously verify and design reliable safety-critical embedded systems involving delays tends to be a grand challenge in computer science and the control community. In contrast to delay-free systems, time-delayed systems yield substantially higher theoretical complexity thus rendering the underlying design and verification tasks significantly harder. This dissertation focuses on the formal verification and controller synthesis of time-delayed dynamical systems, while particularly addressing the safety verification of continuous dynamics governed by delay differential equations and the control-strategy synthesis of discrete dynamics captured by delayed safety games, with applications in a typical set of representative benchmarks from the literature.
Mingshuai Chen
ZJU100 Young Professor
My research interests include formal verification, programming theory, and logical aspects of computer science.